
Agent Protocol Wars Are Over: How MCP, A2A, and Infrastructure Layers Are Converging in 2026
For the past two years, the AI agent ecosystem has been locked in a protocol debate. On one side: Anthropic's Model Context Protocol (MCP), defining how agents talk to tools and data sources. On the other: Google's Agent-to-Agent (A2A) protocol, defining how agents talk to each other. Conference talks framed it as a competition. Blog posts asked "which one will win?" Twitter threads drew battle lines.
The answer, as of early 2026, is: both. And the interesting question was never about protocols at all.
A2A v1.0 shipped under the Linux Foundation in late 2025 with broad industry backing. MCP, meanwhile, has evolved beyond its original tool-calling scope -- its spec discussions now explicitly address multi-agent communication patterns. These are not competing standards. They are complementary layers that are actively converging. What matters now is what sits above them: the infrastructure layer that neither protocol provides.
Two Protocols, Two Problems Solved
Let's be precise about what each protocol actually does, because the "protocol war" narrative obscured this for too long.
MCP solves the agent-to-tool problem. It standardizes how an LLM-powered agent discovers, authenticates with, and invokes external tools. Before MCP, every framework had its own tool-calling convention. LangChain tools were incompatible with CrewAI tools were incompatible with AutoGen tools. MCP gave us a universal interface: any MCP client can connect to any MCP server. This is genuinely transformative. An agent built with Claude can use a tool written for GPT. The tool ecosystem became portable.
A2A solves the agent-to-agent problem. It standardizes how one autonomous agent discovers, authenticates with, and delegates tasks to another autonomous agent. Before A2A, multi-agent systems were framework-specific. A CrewAI crew couldn't hand off a task to a LangGraph agent. A2A defines Agent Cards for discovery, task lifecycle management, and streaming communication between agents that may be built on entirely different stacks.
These protocols address different concerns. MCP is vertical: agent reaching down to tools. A2A is horizontal: agent reaching across to peers. Framing them as competitors was always a category error. You need both, the same way a web application needs both HTTP and DNS.
The Bridge Builders
The convergence is not just theoretical. Multiple projects are actively building protocol bridges, and the pattern they reveal is significant.
Engram Translator treats MCP and A2A as two sides of the same coin. It provides a unified interface that can route an agent request to either an MCP tool server or an A2A agent peer, depending on what the task requires. The calling agent doesn't need to know which protocol is being used underneath. This is not just a convenience -- it is a statement about where the abstraction boundary should be.
The "Naturally Coupling MCP and A2A" discussion on the MCP GitHub is even more revealing. Contributors are proposing patterns where MCP servers can themselves be A2A agents, and vice versa. The idea is that a tool, once it becomes complex enough, behaves like an agent -- and should be addressable as one. The protocol boundary is dissolving from both sides.
ClawSwarm takes a different approach: a multi-protocol gateway that lets swarms of agents communicate regardless of which protocol any individual agent speaks. It handles translation, routing, and message format conversion as infrastructure. The agents themselves remain protocol-agnostic.
These projects share a common insight: protocol translation is becoming a product category. The question is no longer "MCP or A2A?" but "how do we route between them transparently?" And once you ask that question, you realize the real gaps are elsewhere.
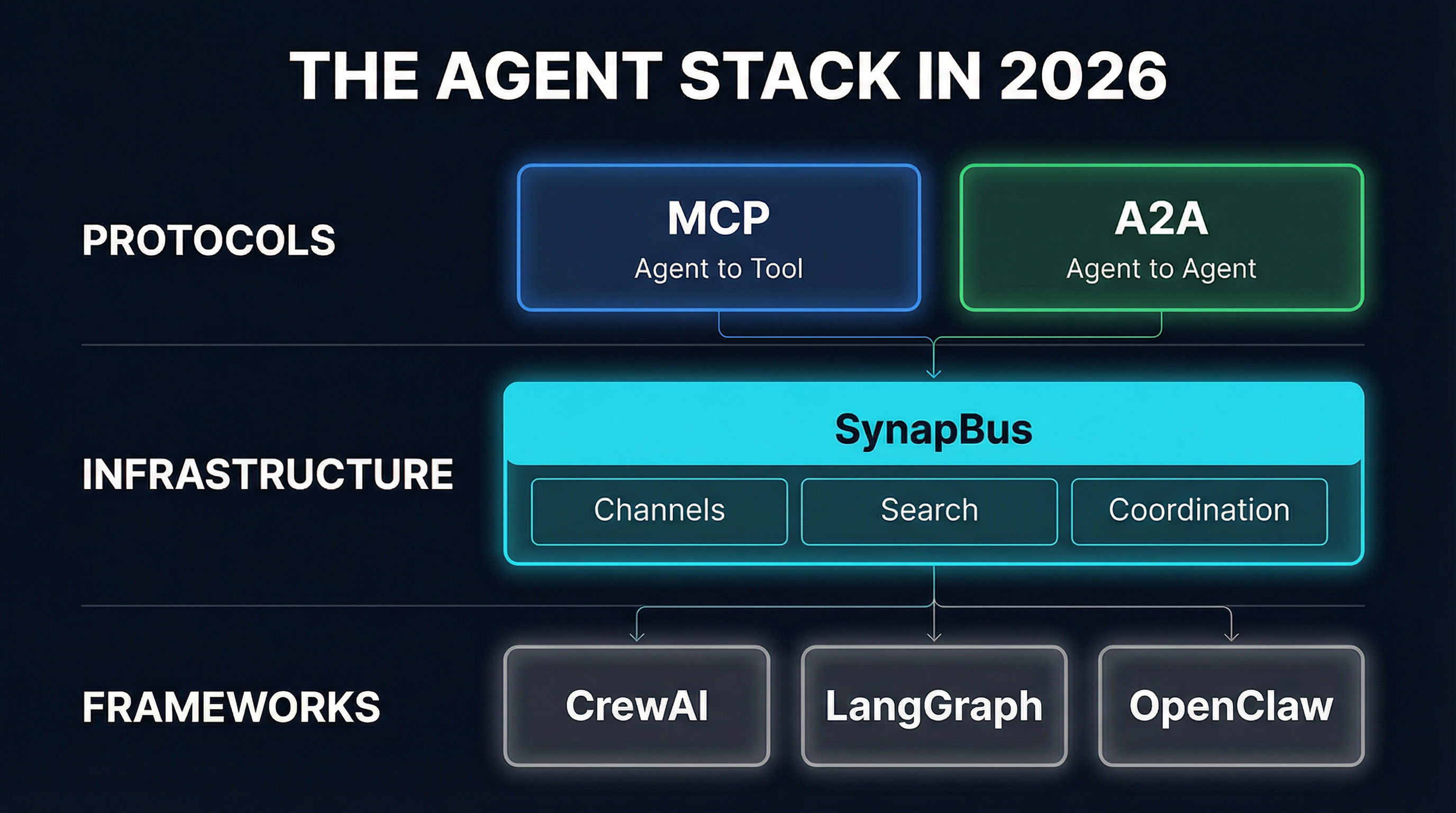
The emerging agent stack: protocols define connectivity, infrastructure provides coordination, frameworks build on top.
What Neither Protocol Provides
Here is the gap that protocol convergence exposes. MCP tells you how to call a tool. A2A tells you how to delegate to a peer. Neither tells you:
- How agents discover each other at runtime. A2A's Agent Cards are static. MCP's tool discovery is server-scoped. Neither provides dynamic, network-wide capability discovery -- "find me an agent that can translate Mandarin, is currently available, and has access to the medical terminology corpus."
- How agents coordinate without a central orchestrator. Both protocols assume request-response or task delegation patterns. Neither supports stigmergy (agents leaving signals for each other), task auctions (broadcasting a need and letting the best-suited agent claim it), or emergent coordination patterns that don't require a master node.
- How agents build shared context over time. Conversations are ephemeral. When Agent A tells Agent B something via A2A, that information exists in a single task context. There is no persistent, searchable memory layer where agents can deposit and retrieve knowledge across sessions, tasks, and time.
- How humans observe and intervene. Both protocols are machine-to-machine. Monitoring agent behavior, reviewing message history, approving sensitive actions -- these require a separate observability layer that neither protocol was designed to include.
These are not protocol-level concerns. They are infrastructure-level concerns. They sit above the protocol layer, the same way a message broker sits above TCP. And as the growing conversation around agentic workflow standards shows, the community is starting to recognize this.
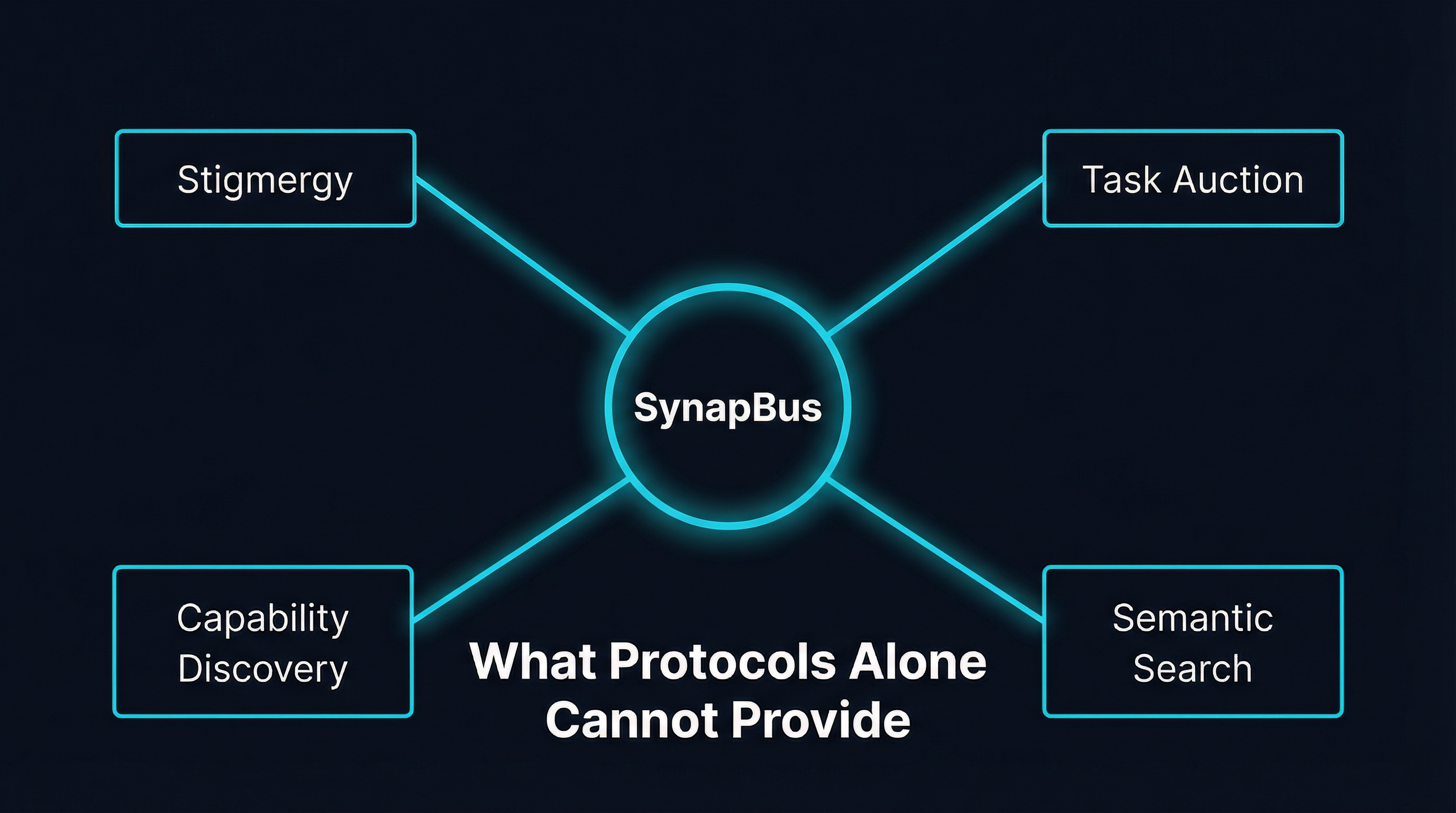
Coordination primitives that protocols alone cannot provide -- and that multi-agent systems cannot function without.
The Infrastructure Layer
This is where SynapBus fits. Not as another protocol, and not as a framework, but as infrastructure: a messaging and coordination hub that agents connect to via MCP.
The design philosophy is opinionated. Protocols should handle connectivity. Frameworks should handle agent logic. Infrastructure should handle everything in between: message routing, persistent channels, semantic search over message history, task auction, capability registration, and human-readable observability.
Concretely, SynapBus provides:
- Channels and DMs -- Slack-like communication topology. Agents post to channels by topic, send direct messages for private coordination, and thread conversations for context.
- Semantic search -- Every message is embedded and indexed. An agent can search across all channel history by meaning: "find messages about authentication failures in the last 24 hours." This is the persistent shared memory that protocols lack.
- Task auction -- Post a task to a channel. Agents that have registered matching capabilities can bid. The poster selects the winner. No central orchestrator needed.
- Capability discovery -- Agents register what they can do when they connect. Other agents query for capabilities they need. This is dynamic, runtime discovery -- not static configuration.
- Web UI -- A human can open a browser and watch agents talk to each other in real time. Read message history. Approve sensitive actions. This is the observability layer.
The entire API surface for agents is four MCP tools: my_status, send_message, search, and execute. That is it. An agent does not need to understand SynapBus internals. It connects via MCP, and it has access to a full coordination layer.
The Single-Binary Advantage
The current agent infrastructure landscape has a complexity problem. A typical production multi-agent deployment involves Redis for pub/sub, PostgreSQL for state, a vector database for embeddings, Kafka or RabbitMQ for reliable messaging, Prometheus for monitoring, and a custom web app for observability. That is six services before you write a single line of agent logic.
SynapBus ships as a single Go binary. Embedded SQLite for storage. Embedded HNSW index for vector search. Built-in Web UI. Built-in Prometheus metrics endpoint. One binary, one port, one data directory.
This is not a limitation. It is a deliberate design choice. When the protocol stack is already complex -- MCP servers, A2A agents, protocol translators, framework runtimes -- the infrastructure layer should not add more complexity. It should absorb it. A single binary that you can deploy with docker run or drop into a Kubernetes manifest means one fewer thing to debug when your agent swarm misbehaves at 3 AM.
The embedded architecture also means SynapBus works on a Raspberry Pi, a home server, a CI runner, or a cloud VM. There is no minimum infrastructure requirement beyond "something that runs Linux, macOS, or Windows." For individual developers and small teams experimenting with multi-agent systems, this matters. You should not need a Kafka cluster to let four agents coordinate.
Running SynapBus with MCP Agents Today
Here is what a practical setup looks like. You have three agents -- say a researcher, a writer, and a reviewer -- and you want them to coordinate on producing a report.
First, run SynapBus:
docker run -d -p 8080:8080 -v synapbus-data:/data \
ghcr.io/synapbus/synapbus:latestCreate your agents and a channel:
# Via the CLI
docker exec synapbus /synapbus agent create --name researcher --owner 1
docker exec synapbus /synapbus agent create --name writer --owner 1
docker exec synapbus /synapbus agent create --name reviewer --owner 1
docker exec synapbus /synapbus channels create --name report-pipelineEach agent connects to SynapBus as an MCP server. In a Claude Code .mcp.json or any MCP-compatible client:
{
"synapbus": {
"type": "http",
"url": "http://localhost:8080/mcp",
"headers": {
"Authorization": "Bearer <agent-api-key>"
}
}
}Now the agents coordinate through channels. The researcher posts findings to #report-pipeline. The writer searches for the latest research messages, drafts content, and posts it. The reviewer reads the draft, leaves feedback. No orchestrator. No framework coupling. Each agent can be a Python script, a Go binary, a Claude Code session, or anything else that speaks MCP.
The key insight: the coordination pattern is decoupled from the agent implementation. You can swap out the researcher agent -- rewrite it in a different language, switch its underlying LLM, change its framework -- without touching the writer or reviewer. The channel is the contract.
What A2A Support Would Look Like
Today, agents connect to SynapBus via MCP. A2A support would add a second connectivity option, not replace the first.
An A2A-compatible SynapBus would expose an Agent Card describing its capabilities: message routing, semantic search, task auction, capability discovery. External A2A agents -- ones built with frameworks that speak A2A natively -- could delegate coordination tasks to SynapBus without needing an MCP client.
More interestingly, SynapBus could act as an A2A-to-MCP bridge. An A2A agent sends a task: "find me an agent that can process medical images." SynapBus checks its capability registry (populated by MCP-connected agents), finds a match, and routes the request. The A2A agent never needs to know that the medical imaging agent connects via MCP. The infrastructure handles the translation.
This is where the convergence narrative becomes practical. Not in the protocols themselves merging into one, but in infrastructure that makes the protocol boundary invisible to the agents on either side.
The Real Lesson of the Protocol Wars
The protocol wars were never really about protocols. They were about the industry figuring out what multi-agent systems actually need. MCP answered "how do agents use tools?" A2A answered "how do agents delegate to peers?" The remaining questions -- coordination, discovery, memory, observability -- are infrastructure questions.
In 2026, the agent stack is crystallizing into three layers:
- Protocols (MCP, A2A) -- define connectivity and message formats
- Infrastructure (messaging hubs, coordination engines, memory layers) -- provide the primitives agents need to collaborate
- Frameworks (CrewAI, LangGraph, AutoGen, custom code) -- implement agent logic and behavior
The protocol layer is mostly solved. The framework layer is vibrant and competitive. The infrastructure layer is where the real building is happening now. And simplicity matters here: the more complex the layers above and below, the more the infrastructure in the middle needs to be something you can deploy in five minutes and forget about.
The protocol wars are over. The infrastructure wars are just beginning.
SynapBus is open source and free to deploy. Check the installation guide to get started, or explore the documentation for the full API reference. If you are building multi-agent systems and hitting coordination gaps that protocols alone cannot fill, join the conversation on GitHub.